研究内容Research
超音速飛行に向けたUAV制御技術
1. 小型無人超音速機向け離陸滑走を実証する制御系
研究目的
本学の航空宇宙機システム研究センターでは、大気中を高速・高高度で飛行するための基盤技術の研究開発が行われており、そのテストベットとして小型無人超音速実験機の開発が進められています。小型無人機は滑走路から離着陸しなければなりません。しかし、超音速のものに限らず小型無人機の自律的な滑走離陸は前例がほとんどなく、その手法が確立されておりません。そのため、制御則設計の目標精度やその指針となる要素が不明確であり、安定的に滑走するための目標精度や条件を明らかにする必要があります。
このような背景のもと、本研究室では滑走離陸のための制御手法を提案し、シミュレーションおよびラジコン機での実証実験において性能を確認することにより小型無人機の安定した滑走離陸技術の確立を目指しています。
離陸制御系構成
一般に離陸とは、機体が静止した状態から加速して、所定の高度に達するまでの区間を指します。本研究では離陸を「滑走」・「機首上げによる浮上」・「上昇」の三段階に分けて実現していきます。
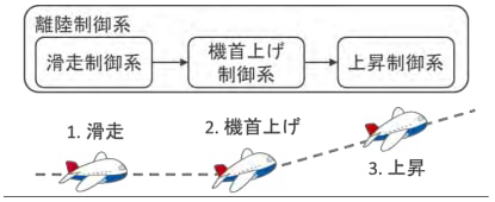
離陸制御系概略図
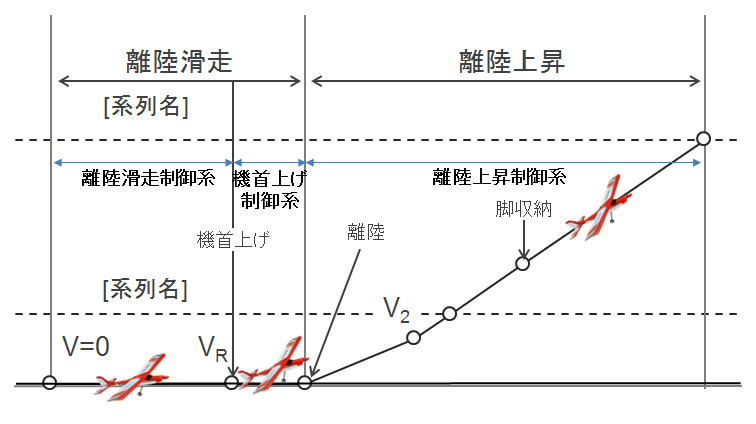
離陸プロファイル
本ページでは「滑走」に関する制御技術をご紹介します。
滑走誘導制御系
小型無人機が滑走路上を滑走する場合を想定した誘導制御系です。本研究では機体の制御手法にステアリングを使用しています。
滑走誘導制御系は、機体位置の滑走路中心線からの偏差dから方位角コマンドψcmdを算出する滑走路中心維持制御系と、方位角コマンドψcmdに合わせて機体の方位角ψを制御する滑走方向制御系で構成されています。

滑走路中心維持制御系ブロック図

滑走方向制御系ブロック図
実証実験結果
本研究の実験は実験1「滑走方向制御の滑走実験(滑走時の機体方位角が方位角コマンドに追従できているか)」を実施し、滑走方向制御系の性能が十分に確認できれば、実験2「滑走路中心維持の実験(機体位置が滑走路中心線に追従できているか)」を実施しました。実験時の制御系パラメータは古典制御理論とシミュレーションにより設計したものを使用しました。

滑走路中心維持実験時のラジコン機の滑走軌跡
こちらが実験時の機体の滑走軌跡です。手動でラジコン機を操作しなくても滑走路の中心を維持できていることが一目でわかります。

